科曼斯-注塑行業自動化整體解決方案專業提供商
專注注塑設備10余年,成功服務1000+家企業
科曼斯服務熱線
0769-88877337
138 2926 9725
科曼斯-注塑行業自動化整體解決方案專業提供商
專注注塑設備10余年,成功服務1000+家企業
科曼斯服務熱線
0769-88877337
138 2926 9725

廣東科曼斯智能科技有限公司
聯系人:呂先生 13829269725
邱小姐 13418234031
Tel: 0769-88877337
E-mail:dglqm@kemansi.com
地址: 東莞市高埗鎮冼沙五坊祥福路3號
網址:qjogr.cn
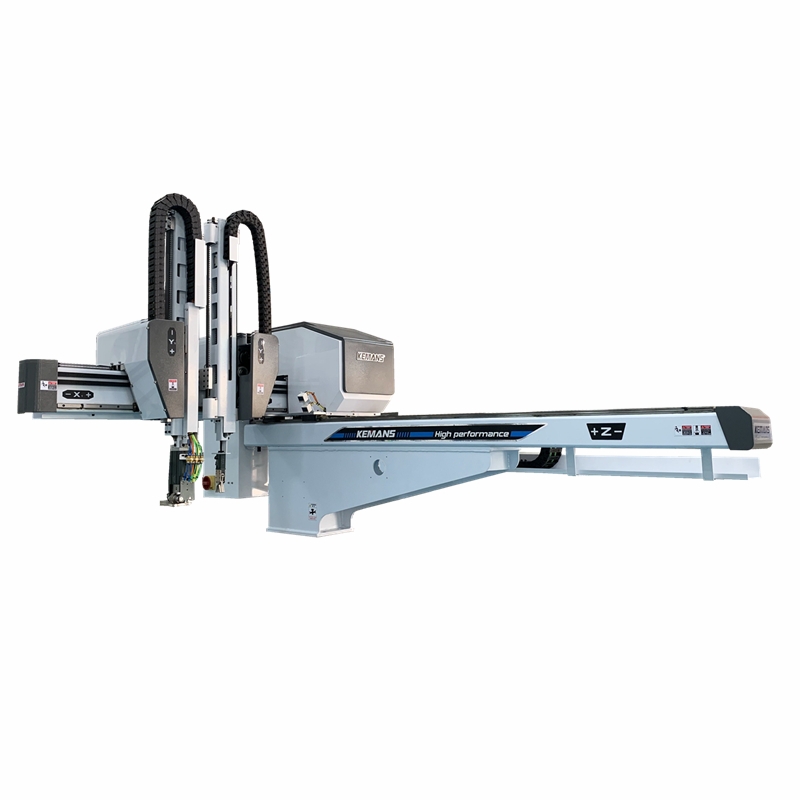
高速機械系統是這個高速機械手中難度最低的一部分,我們可以看到各種各樣的工業機器人,他們都能夠快速的在工位之間移動。快速的鉆頭、切割機、螺旋槳等速度可以高達幾萬轉每秒。所以,高速對于機器人而言并不是瓶頸,而是有沒有實際需要。以自主移動機器人為例,它的本體大多是一種輪式小車。
照理說它可以跑得飛快,鹽湖城的試車場最快賽車速度已經有400多公里每小時的記錄,不過最先進的自主移動機器人“火星車”只能以5cm/s的速度行走,速度快了之后它就反應不過來,就可以撞到障礙物或掉到溝里。高速機械手高速移動的時候和其它的回轉機械不一樣,因為它的行程是一個有限的角,在這個角度內不斷的起停和反向。高速運動的時候產生的慣性力會對到位控制和機械系統可靠性產生重大的影響。結構越重,產生的慣性力就越大,位置控制的難度也隨之增加。輕質的物體在反復擺動過程中不會對擺臂關節產生多少作用力,重物可能會讓關節負荷很重的交變載荷,這樣情況下高速機械手的機械系統很快就會被破壞掉。
 724小時服務支持
724小時服務支持
 型號齊全可非標定制
型號齊全可非標定制
 機械手源頭生產廠家
機械手源頭生產廠家
 做工精密 壽命長
做工精密 壽命長