科曼斯-注塑行業(yè)自動化整體解決方案專業(yè)提供商
專注注塑設備10余年,成功服務1000+家企業(yè)
科曼斯服務熱線
0769-88877337
138 2926 9725
科曼斯-注塑行業(yè)自動化整體解決方案專業(yè)提供商
專注注塑設備10余年,成功服務1000+家企業(yè)
科曼斯服務熱線
0769-88877337
138 2926 9725

廣東科曼斯智能科技有限公司
聯(lián)系人:呂先生 13829269725
邱小姐 13418234031
Tel: 0769-88877337
E-mail:dglqm@kemansi.com
地址: 東莞市高埗鎮(zhèn)冼沙五坊祥福路3號
網(wǎng)址:qjogr.cn
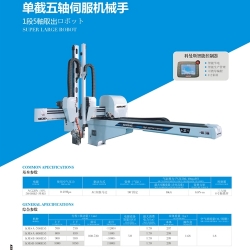
五軸機械手的編程方式主要有以下幾種:
一、示教編程
在線示教
這是一種比較直觀的編程方式。操作人員通過手動操縱機械手的末端執(zhí)行器,使其按照預定的動作路徑運動。在運動過程中,機械手控制系統(tǒng)會記錄下各個軸的位置、速度和動作順序等信息。例如,在汽車零部件的焊接任務中,操作人員可以握住機械手的焊接工具,沿著焊接的焊縫軌跡移動,機械手就會 “記住” 這個路徑。
其優(yōu)點是簡單易學,不需要復雜的編程知識。對于一些形狀不太復雜、路徑相對固定的任務非常適用。但缺點是編程效率較低,而且對于復雜的三維空間曲線軌跡,示教的精度可能會受到操作人員熟練程度的影響。

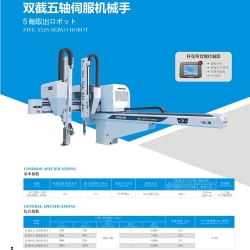
離線示教
離線示教是利用專門的編程軟件,在計算機上模擬機械手的工作環(huán)境和動作。操作人員可以在虛擬的三維空間中設計機械手的運動路徑,設置各個軸的參數(shù)。例如,在電子產(chǎn)品組裝中,通過離線編程軟件,可以準確地設計機械手拿起微小電子元件并將其放置在電路板指 定位置的路徑。
這種方式的優(yōu)點是可以在不影響實際生產(chǎn)的情況下進行編程,并且能夠?qū)碗s的動作進行準確設計。同時,通過軟件可以對編程后的動作進行反復驗證和優(yōu)化。不過,它需要操作人員熟悉編程軟件,并且對實際工作環(huán)境的模擬精度要求較高。
二、語言編程
專用編程語言
許多五軸機械手制造商都開發(fā)了自己的專用編程語言。這些語言通常具有簡潔明了的指令集,用于控制機械手的運動、速度、加速度等參數(shù)。例如,通過特定的指令可以準確地控制機械手的一個軸旋轉(zhuǎn)一定的角度,或者以特定的速度移動到某個坐標位置。
這種編程方式的優(yōu)點是可以實現(xiàn)非常準確的控制,能夠滿足復雜的生產(chǎn)任務需求。但是,學習這些專用編程語言需要一定的時間和精力,而且不同品牌機械手的編程語言可能不同,缺乏通用性。
通用編程語言結(jié)合運動控制庫
利用像 C++、Python 等通用編程語言,結(jié)合專門的運動控制庫來編程。例如,在一些科研項目中,使用 Python 語言和相關的機器人運動控制庫,可以方便地實現(xiàn)對五軸機械手的控制。這種方式的靈活性較高,可以與其他系統(tǒng)(如傳感器系統(tǒng)、視覺系統(tǒng))進行更好的集成。不過,它對編程人員的編程能力要求較高。
 724小時服務支持
724小時服務支持
 型號齊全可非標定制
型號齊全可非標定制
 機械手源頭生產(chǎn)廠家
機械手源頭生產(chǎn)廠家
 做工精密 壽命長
做工精密 壽命長