-
五軸機(jī)械手的編程方式主要有以下幾種: 一、示教編程 在線(xiàn)示教 這是一種比較直觀的編程方式。操作人員通過(guò)手動(dòng)操縱機(jī)械手的末端執(zhí)行器,使其按照預(yù)定的動(dòng)作路徑運(yùn)動(dòng)。在運(yùn)動(dòng)過(guò)程中,機(jī)械手控制系統(tǒng)會(huì)記錄下各個(gè)軸的位置、速度和動(dòng)作順序等信息。
發(fā)布時(shí)間:2024-10-29 點(diǎn)擊次數(shù):3
-
五軸機(jī)械手的程序調(diào)試是一個(gè)涉及多個(gè)步驟的過(guò)程,主要包括程序編寫(xiě)、參數(shù)調(diào)整、校準(zhǔn)以及測(cè)試驗(yàn)證等。以下是一個(gè)概括性的調(diào)試流程: 一、程序編寫(xiě) 新建程序:首先,在機(jī)械手控制系統(tǒng)的界面上,新建一個(gè)程序文件,并為其命名。 編輯程序:根據(jù)機(jī)械
發(fā)布時(shí)間:2024-08-23 點(diǎn)擊次數(shù):23
-
五軸機(jī)械手通常可以根據(jù)以下幾個(gè)標(biāo)準(zhǔn)進(jìn)行分類(lèi): 關(guān)節(jié)結(jié)構(gòu): 串聯(lián)型五軸機(jī)械手并聯(lián)型五軸機(jī)械手 工作空間形狀: 卡特式五軸機(jī)械手關(guān)節(jié)式五軸機(jī)械手環(huán)形五軸機(jī)械手 驅(qū)動(dòng)方式: 電機(jī)驅(qū)動(dòng)型五軸機(jī)械手液壓驅(qū)動(dòng)型五軸機(jī)械手氣動(dòng)驅(qū)動(dòng)型五軸機(jī)
發(fā)布時(shí)間:2024-07-31 點(diǎn)擊次數(shù):14
-
注塑行業(yè)中,五軸伺服機(jī)械手相比于傳統(tǒng)的三軸伺服機(jī)械手,擁有以下顯著的好處和優(yōu)點(diǎn):1、更高的精度:五軸伺服機(jī)械手由于擁有更多的伺服驅(qū)動(dòng)軸(比三軸多兩個(gè)),能夠在三維空間內(nèi)更準(zhǔn)確地定位和移動(dòng),實(shí)現(xiàn)更精細(xì)的控制和操作。2、更快的速度:五軸系統(tǒng)可以
發(fā)布時(shí)間:2024-07-11 點(diǎn)擊次數(shù):16
-
注塑五軸機(jī)械手又名五軸機(jī)械手或五軸伺服機(jī)械手,注塑行業(yè)使用的五軸伺服機(jī)械手中的“五軸”通常指的是以下五個(gè)運(yùn)動(dòng)軸:1.主臂引拔軸:控制機(jī)械手的主體部分沿前后方向移動(dòng),實(shí)現(xiàn)從注塑機(jī)模具中取出制品或水口的動(dòng)作。2.主臂上下軸:負(fù)責(zé)機(jī)械手主體部分的
發(fā)布時(shí)間:2024-06-12 點(diǎn)擊次數(shù):47
-
教導(dǎo)五軸機(jī)械手的方法可以大致分為以下幾種: 1.手動(dòng)示教:通過(guò)手動(dòng)機(jī)械臂的關(guān)節(jié),將其移動(dòng)到所需的位置并記錄下關(guān)節(jié)角度或位置信息。這種方法簡(jiǎn)單直觀,但需要較長(zhǎng)的時(shí)間和經(jīng)驗(yàn)以確保準(zhǔn)確性。 2.示教器示教:使用專(zhuān)門(mén)的示教器設(shè)備,通過(guò)示
發(fā)布時(shí)間:2024-02-19 點(diǎn)擊次數(shù):38
-
五軸機(jī)械手的跟隨功能是指機(jī)械手可以根據(jù)預(yù)定的路徑或者外部指令實(shí)現(xiàn)對(duì)物體或工具的跟隨運(yùn)動(dòng)。該功能使得機(jī)械手可以自動(dòng)適應(yīng)不規(guī)則的工件形狀或動(dòng)態(tài)變化的工作環(huán)境。 具體而言,五軸機(jī)械手的跟隨功能依賴(lài)于其控制系統(tǒng)和傳感器的配合。以下是一些常見(jiàn)的
發(fā)布時(shí)間:2024-01-22 點(diǎn)擊次數(shù):61
-
五軸機(jī)械手的信號(hào)檢測(cè)在工業(yè)自動(dòng)化中起著關(guān)鍵作用。它主要用于檢測(cè)和監(jiān)控機(jī)械手在工作過(guò)程中的各種信號(hào),以便實(shí)現(xiàn)的控制和運(yùn)動(dòng)。以下是一些常見(jiàn)的信號(hào)檢測(cè)用途: 1.位置檢測(cè):通過(guò)檢測(cè)機(jī)械手的位置信號(hào),可以確保每個(gè)軸的位置,從而實(shí)現(xiàn)運(yùn)動(dòng)控制。
發(fā)布時(shí)間:2024-01-17 點(diǎn)擊次數(shù):58
-
五軸機(jī)械手和三軸機(jī)械手的區(qū)別主要在于其工作范圍和靈活性。 三軸機(jī)械手: 1.工作范圍:三軸機(jī)械手通常由基座、腰部和手腕組成,可以在三個(gè)軸向上運(yùn)動(dòng),即上下、前后和左右。它們可以完成基本的二維平面運(yùn)動(dòng)和一定程度的轉(zhuǎn)動(dòng),適用于簡(jiǎn)單的直
發(fā)布時(shí)間:2024-01-13 點(diǎn)擊次數(shù):99
-
五軸機(jī)械手包括主臂、副臂和手腕等部件,調(diào)整這些部件需要按照具體的機(jī)械手型號(hào)和手冊(cè)進(jìn)行。下面是一般情況下對(duì)五軸機(jī)械手主臂和副臂進(jìn)行調(diào)整的一般步驟: 1.松開(kāi)固定螺栓:首先,根據(jù)機(jī)械手的手冊(cè),找到主臂和副臂的固定螺栓,松開(kāi)這些螺栓,以便
發(fā)布時(shí)間:2024-01-13 點(diǎn)擊次數(shù):83
-
接注塑機(jī)的方法通常取決于具體的生產(chǎn)場(chǎng)景和工藝要求,下面是一種常見(jiàn)的五軸機(jī)械手接注塑機(jī)的方法: 1.位置布置:首先確定五軸機(jī)械手的位置布置,通常需要考慮到機(jī)械手可以覆蓋整個(gè)注塑機(jī)的工作區(qū)域,并且能夠準(zhǔn)確地取放模具和成品。 2.程序
發(fā)布時(shí)間:2024-01-05 點(diǎn)擊次數(shù):108
-
五軸機(jī)械手是一種具有復(fù)雜運(yùn)動(dòng)和控制系統(tǒng)的機(jī)械裝置,調(diào)試是確保機(jī)械手正常工作的關(guān)鍵步驟。以下是一般的五軸機(jī)械手調(diào)試方法的概述: 1.基礎(chǔ)設(shè)置: 確定機(jī)械手的安裝位置和朝向,并進(jìn)行機(jī)械結(jié)構(gòu)的調(diào)整和修正。 確定機(jī)械手工作區(qū)域和邊界
發(fā)布時(shí)間:2024-01-04 點(diǎn)擊次數(shù):118
-
五軸機(jī)械手的視覺(jué)定位方法通常涉及使用攝像頭和圖像處理算法來(lái)確定物體的位置和姿態(tài)。以下是一種常見(jiàn)的五軸機(jī)械手視覺(jué)定位方法的基本步驟: 1.攝像頭獲取圖像:首先,攝像頭拍攝包含要處理的物體的圖像。這些圖像可以是在機(jī)械手范圍內(nèi)的物體,例如
發(fā)布時(shí)間:2023-12-30 點(diǎn)擊次數(shù):58
-
五軸機(jī)械手的堆疊通常需要進(jìn)行以下設(shè)置: 1.定義堆疊位置:確定產(chǎn)品堆疊的位置,包括堆疊的高度、堆疊的角度和堆疊的位置。這些參數(shù)需要根據(jù)具體的產(chǎn)品和堆疊方式來(lái)確定。 2.確定堆疊順序:確定產(chǎn)品堆疊的順序,通常是先進(jìn)先出(FIFO)
發(fā)布時(shí)間:2023-12-23 點(diǎn)擊次數(shù):104
-
如果五軸機(jī)械手使用執(zhí)行出現(xiàn)故障,以下是一些可能的解決方法: 1.檢查電源和電源線(xiàn),確保機(jī)械手有足夠的電力供應(yīng)。檢查電源線(xiàn)是否插緊,避免電源不穩(wěn)定造成故障。 2.檢查信號(hào)線(xiàn)和控制器連接。確保信號(hào)線(xiàn)插緊且未損壞,避免信號(hào)丟失導(dǎo)致機(jī)械
發(fā)布時(shí)間:2023-12-23 點(diǎn)擊次數(shù):53
-
首先,五軸機(jī)械手出現(xiàn)故障可能有很多種原因,以下是一些常見(jiàn)的故障和解決方法: 1.電源問(wèn)題:確保機(jī)械手的電源正常連接并供電,檢查電源線(xiàn)是否損壞或松動(dòng)。如果需要,嘗試連接到其他電源插座來(lái)排除電源問(wèn)題。 2.控制系統(tǒng)故障:檢查控制系統(tǒng)
發(fā)布時(shí)間:2023-12-16 點(diǎn)擊次數(shù):92
-
選擇五軸機(jī)械手副臂時(shí),需要考慮以下幾個(gè)因素: 1.負(fù)載能力:根據(jù)你的應(yīng)用需求,選擇能夠承載所需負(fù)載的副臂。確保副臂能夠穩(wěn)定地目標(biāo)物體。 2.工作范圍:考慮副臂的工作半徑和運(yùn)動(dòng)范圍,確保其能夠覆蓋到你需要處理的工件或空間。 3.
發(fā)布時(shí)間:2023-12-15 點(diǎn)擊次數(shù):49
-
設(shè)置五軸機(jī)械手的雙程序可以實(shí)現(xiàn)兩個(gè)不同的程序之間的切換和執(zhí)行。以下是設(shè)置雙程序的一般步驟: 1.編寫(xiě)兩個(gè)獨(dú)立的程序:首先,編寫(xiě)兩個(gè)獨(dú)立的程序,分別描述每個(gè)程序需要完成的任務(wù)和動(dòng)作序列。確保每個(gè)程序都能夠在獨(dú)立運(yùn)行時(shí)完成預(yù)期的工作。
發(fā)布時(shí)間:2023-12-08 點(diǎn)擊次數(shù):69
-
五軸機(jī)械手因其靈活性、多功能性和高精度而深受廣泛使用。以下是五軸機(jī)械手受歡迎的原因: 1.多自由度:五軸機(jī)械手具有五個(gè)獨(dú)立的旋轉(zhuǎn)軸,可以在多個(gè)方向上進(jìn)行運(yùn)動(dòng)和定位。這種多自由度的設(shè)計(jì)使得機(jī)械手能夠執(zhí)行復(fù)雜的動(dòng)作和任務(wù),例如彎曲、旋轉(zhuǎn)
發(fā)布時(shí)間:2023-12-08 點(diǎn)擊次數(shù):56
-
五軸機(jī)械手的起點(diǎn)位置設(shè)置取決于具體的控制系統(tǒng)和使用場(chǎng)景,一般有以下幾種方式來(lái)設(shè)置起點(diǎn)位置: 1.示教模式:某些機(jī)械手控制系統(tǒng)支持示教模式,用戶(hù)可以手動(dòng)運(yùn)行機(jī)械手,將其移動(dòng)到所需的起點(diǎn)位置。在示教模式下,機(jī)械手的位置和姿態(tài)信息將被記錄
發(fā)布時(shí)間:2023-12-01 點(diǎn)擊次數(shù):69
-
五軸機(jī)械手的跟隨功能是指機(jī)械手能夠根據(jù)特定的路徑或目標(biāo)對(duì)象進(jìn)行動(dòng)態(tài)跟隨和運(yùn)動(dòng)。這項(xiàng)功能使得機(jī)械手能夠?qū)崿F(xiàn)對(duì)移動(dòng)目標(biāo)的追蹤和工作,提高了機(jī)械手的靈活性和自動(dòng)化能力。 具體來(lái)說(shuō),五軸機(jī)械手的跟隨功能包括以下幾個(gè)方面: 1.路徑跟蹤:機(jī)
發(fā)布時(shí)間:2023-12-01 點(diǎn)擊次數(shù):89
-
當(dāng)五軸機(jī)械手在吸取產(chǎn)品時(shí)發(fā)出報(bào)警時(shí),可能存在以下問(wèn)題: 1.吸嘴故障:吸嘴可能存在堵塞、磨損或松動(dòng)等問(wèn)題,導(dǎo)致無(wú)法正常吸取產(chǎn)品或吸取不穩(wěn)定。這可能是機(jī)械手報(bào)警的原因之一。 2.真空系統(tǒng)故障:機(jī)械手通常使用真空系統(tǒng)進(jìn)行吸取產(chǎn)品,如
發(fā)布時(shí)間:2023-11-25 點(diǎn)擊次數(shù):118
-
五軸機(jī)械手的夾水口位置調(diào)整通常需要依據(jù)具體的機(jī)械手型號(hào)和工作需求進(jìn)行。下面是一般的調(diào)整步驟: 1.查閱機(jī)械手的手冊(cè):首先,您需要查閱機(jī)械手的手冊(cè),了解關(guān)于夾水口位置調(diào)整的具體說(shuō)明和步驟。不同的機(jī)械手型號(hào)和品牌可能有不同的調(diào)整方法和要
發(fā)布時(shí)間:2023-11-24 點(diǎn)擊次數(shù):51
-
五軸機(jī)械手的信號(hào)檢測(cè)可以用來(lái)檢測(cè)機(jī)械手的運(yùn)行狀態(tài),例如夾具的開(kāi)關(guān)狀態(tài)、橫行姿勢(shì)、原點(diǎn)復(fù)歸、上下復(fù)歸姿勢(shì)、水平待機(jī)、鎖模到位、安全門(mén)檢測(cè)和壓力檢測(cè)等,以確保機(jī)械手在運(yùn)行過(guò)程中的穩(wěn)定性和安全性。 再選擇點(diǎn)擊屏幕中“信號(hào)設(shè)定”按鈕可進(jìn)入信號(hào)
發(fā)布時(shí)間:2023-10-12 點(diǎn)擊次數(shù):56
-
五軸機(jī)械手的C軸是指機(jī)械手主臂治具水平軸和垂直軸,五軸機(jī)械手就是指有五個(gè)方向軸(坐標(biāo)軸)可以單獨(dú)或聯(lián)動(dòng)進(jìn)行調(diào)整和控制的自動(dòng)機(jī)床或智能機(jī)床。大多數(shù)習(xí)慣采用X、Y、Z三個(gè)字母的坐標(biāo)系來(lái)表示,而C軸則表示不是正反雙向旋轉(zhuǎn)軸,僅僅只是正反雙向調(diào)
發(fā)布時(shí)間:2023-09-27 點(diǎn)擊次數(shù):117
-
五軸機(jī)械手的功率大小會(huì)受到多個(gè)因素的影響,包括機(jī)械手的尺寸、載荷能力、運(yùn)動(dòng)速度以及所執(zhí)行的工作類(lèi)型等。 通常情況下,五軸機(jī)械手的功率可以從幾百瓦到數(shù)千瓦不等。較小尺寸、低載荷要求的五軸機(jī)械手可能功率較低,一般在數(shù)百瓦到數(shù)千瓦之間。而大
發(fā)布時(shí)間:2023-09-16 點(diǎn)擊次數(shù):166
-
我們是一家專(zhuān)業(yè)從事注塑機(jī)機(jī)械手研發(fā)與生產(chǎn)的廠家,為您帶來(lái)全新的高精度五軸注塑機(jī)機(jī)械手,在助您實(shí)現(xiàn)智能生產(chǎn)方面起到至關(guān)重要的作用!相比起傳統(tǒng)機(jī)械手,我們的五軸注塑機(jī)機(jī)械手更具五個(gè)優(yōu)勢(shì):高精度、高速度、高可靠性、高操作自由度和高靈活性,可以滿(mǎn)足
發(fā)布時(shí)間:2023-06-09 點(diǎn)擊次數(shù):273
-
五軸機(jī)械手是目前常見(jiàn)的工業(yè)生產(chǎn)自動(dòng)化設(shè)備之一,由于其使用頻率較高,因此在長(zhǎng)時(shí)間使用中,不可避免地會(huì)出現(xiàn)各種問(wèn)題。其中一種較為常見(jiàn)的問(wèn)題是機(jī)械手Y軸過(guò)載,導(dǎo)致機(jī)械手不能正常運(yùn)轉(zhuǎn)。下面將介紹一些解決方案,希望對(duì)您有所幫助。1.檢查機(jī)械手Y軸部
發(fā)布時(shí)間:2023-06-02 點(diǎn)擊次數(shù):633
-
五軸機(jī)械手是一種復(fù)雜的操控設(shè)備,其擁有五個(gè)關(guān)鍵的軸,分別是X軸、Y軸、Z軸以及兩個(gè)旋轉(zhuǎn)軸,這些軸各自都有著重要的作用,下面我們來(lái)詳細(xì)了解一下各個(gè)軸的作用: X軸:X軸是機(jī)械手的水平軸,它的主要作用是允許機(jī)械手在水平方向上移動(dòng),從而使
發(fā)布時(shí)間:2023-05-10 點(diǎn)擊次數(shù):379
-
怎么選擇五軸機(jī)械手軸承型號(hào) 選擇五軸機(jī)械手軸承型號(hào)需要考慮多方面的因素,以下是一些重要的考慮因素: 軸承載荷:首先需要考慮的就是機(jī)械手的負(fù)載情況,包括水平和垂直方向上的負(fù)載。根據(jù)機(jī)械手的載荷情況,選擇能夠承受負(fù)載的合適軸承型號(hào)。
發(fā)布時(shí)間:2023-04-28 點(diǎn)擊次數(shù):292
-
五軸機(jī)械手與六軸機(jī)器人的區(qū)別? 五軸機(jī)械手和六軸機(jī)器人是兩種常用的工業(yè)自動(dòng)化設(shè)備,它們?cè)诮Y(jié)構(gòu)和功能上存在一些差異。 結(jié)構(gòu)上的區(qū)別: 五軸機(jī)械手通常由三個(gè)旋轉(zhuǎn)軸和兩個(gè)線(xiàn)性軸組成,旋轉(zhuǎn)軸可以實(shí)現(xiàn)水平、垂直和旋轉(zhuǎn)運(yùn)動(dòng),線(xiàn)性軸可以實(shí)現(xiàn)前后
發(fā)布時(shí)間:2023-04-11 點(diǎn)擊次數(shù):149
-
五軸機(jī)械手和六軸機(jī)器人是現(xiàn)代工業(yè)中常見(jiàn)的自動(dòng)化設(shè)備。它們?cè)谏a(chǎn)線(xiàn)上自動(dòng)化生產(chǎn)過(guò)程中發(fā)揮著重要的作用。雖然它們都是機(jī)械臂類(lèi)型的機(jī)器人,但它們之間還是有一些區(qū)別的。 首先,五軸機(jī)械手和六軸機(jī)器人的數(shù)量不同。五軸機(jī)械手通常由五個(gè)旋轉(zhuǎn)關(guān)節(jié)組成
發(fā)布時(shí)間:2023-04-04 點(diǎn)擊次數(shù):292
-
五軸機(jī)械手堆疊怎么使用? 五軸機(jī)械手堆疊是一種常見(jiàn)的自動(dòng)化生產(chǎn)線(xiàn)設(shè)備,它可以將物料自動(dòng)堆疊到指定的高度和位置。五軸機(jī)械手堆疊具有高效、精準(zhǔn)和節(jié)省人力成本等優(yōu)點(diǎn),因此在許多生產(chǎn)領(lǐng)域被廣泛應(yīng)用。 使用五軸機(jī)械手堆疊需要注意以下幾個(gè)方面:
發(fā)布時(shí)間:2023-03-23 點(diǎn)擊次數(shù):88
-
五軸機(jī)械手怎么控制呢 五軸機(jī)械手的控制通常分為以下幾個(gè)步驟: 建立機(jī)械手模型:首先需要建立機(jī)械手的運(yùn)動(dòng)學(xué)模型,包括各個(gè)關(guān)節(jié)的旋轉(zhuǎn)軸線(xiàn)、關(guān)節(jié)長(zhǎng)度、關(guān)節(jié)角度范圍等參數(shù)。 設(shè)計(jì)運(yùn)動(dòng)控制器:根據(jù)機(jī)械手的運(yùn)動(dòng)學(xué)模型,設(shè)計(jì)控制器來(lái)控制機(jī)械手的
發(fā)布時(shí)間:2023-03-13 點(diǎn)擊次數(shù):123
-
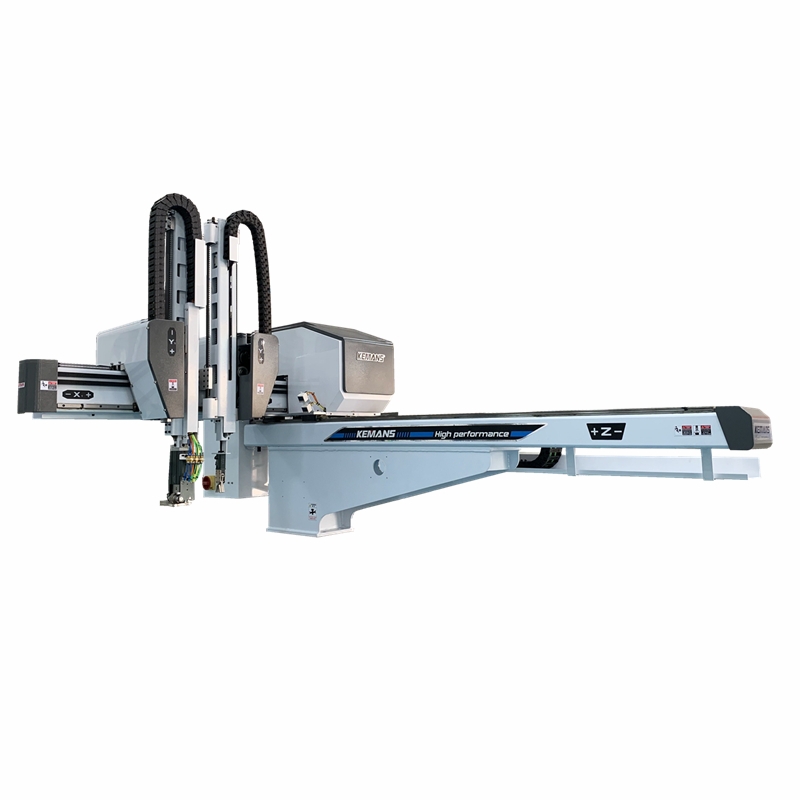
五軸機(jī)械手由4臺(tái)大功率伺服電機(jī)組成,可實(shí)現(xiàn)工件的定位,保證設(shè)備運(yùn)動(dòng)軌跡的平穩(wěn)。取臂采用特種鋁型材,剛性和強(qiáng)度更強(qiáng);機(jī)器人主體采用鋼結(jié)構(gòu),重約400kg,采用數(shù)控折彎成型。表面經(jīng)過(guò)噴塑處理。不僅環(huán)保無(wú)污染,而且機(jī)器人的外觀質(zhì)量耐磨、耐腐蝕。五
發(fā)布時(shí)間:2022-12-30 點(diǎn)擊次數(shù):79
-
科曼斯公司的機(jī)械手,相信大家都比較了解,對(duì)于機(jī)械手國(guó)內(nèi)沒(méi)有幾家能這么專(zhuān)業(yè),我們專(zhuān)注注塑設(shè)備10余年,成功服務(wù)1000+家企業(yè)。對(duì)于機(jī)械手我們采用高效應(yīng)AC伺服馬達(dá)驅(qū)動(dòng),對(duì)于五軸機(jī)械手下面一文來(lái)解答您的疑難。機(jī)械手是早的工業(yè)機(jī)器人,也是早的現(xiàn)
發(fā)布時(shí)間:2022-11-21 點(diǎn)擊次數(shù):76
-
在傳統(tǒng)的注塑工藝中,從Z早期的手工成型,到注塑機(jī)油壓成型,在今天計(jì)算機(jī)控制的成型工藝的演變中,進(jìn)步不僅體現(xiàn)在產(chǎn)品的工藝質(zhì)量、外觀,以及成型效率上。注塑機(jī)的競(jìng)爭(zhēng)越來(lái)越激烈,五軸伺服機(jī)械手(雙切),適用于30~450T各種塑料水平注塑機(jī),有五軸
發(fā)布時(shí)間:2022-11-15 點(diǎn)擊次數(shù):73
-
在機(jī)械手行業(yè)也分為三軸、五軸、伺服系統(tǒng),機(jī)械手在食品行業(yè)深受大家的喜愛(ài)。眾所周知我們注塑行業(yè)使用較多的是三軸機(jī)械手配合五軸機(jī)械手,它們是由執(zhí)行機(jī)構(gòu)、驅(qū)動(dòng)機(jī)構(gòu)和控制系統(tǒng)三大部分組成,代替人工進(jìn)行自動(dòng)切嘴和模具插片、模具貼標(biāo)、模具組裝、塑料、分
發(fā)布時(shí)間:2022-09-30 點(diǎn)擊次數(shù):78
-
五軸機(jī)械手的執(zhí)行部分可以根據(jù)控制中心的命令執(zhí)行命令,完成操作員指定的任務(wù),并按期完成。當(dāng)用戶(hù)接收到任務(wù)時(shí),只需在控制面板中輸入相應(yīng)的任務(wù)值,即可觸發(fā)機(jī)器工作。五軸機(jī)械手在產(chǎn)品結(jié)構(gòu)性能上有了很大的提高,機(jī)械結(jié)構(gòu)的工藝和尺寸設(shè)計(jì)都更加合理高效、
發(fā)布時(shí)間:2022-08-25 點(diǎn)擊次數(shù):222
-
三軸、五軸伺服機(jī)械手應(yīng)安裝在金屬等阻燃的地方,因?yàn)闄C(jī)械手是電氣設(shè)備,如果接觸可燃物會(huì)產(chǎn)生劇烈的化學(xué)反應(yīng),所以要特別注意安裝環(huán)境是否遠(yuǎn)離可燃物,消除潛在危險(xiǎn)。機(jī)械手可以通過(guò)其對(duì)周?chē)h(huán)境的準(zhǔn)確感知,并通過(guò)對(duì)相關(guān)數(shù)據(jù)的感知和分析,識(shí)別采集到的各種
發(fā)布時(shí)間:2022-07-20 點(diǎn)擊次數(shù):113
-
根據(jù)不同的應(yīng)用場(chǎng)所,有上百種型號(hào)的產(chǎn)品供客戶(hù)選擇,如牛頭伺服機(jī)械手、伺服機(jī)械手、三軸機(jī)械手、五軸機(jī)械手、斜臂機(jī)械手、超低空間專(zhuān)用機(jī)械手等。自然堂、玉蘭油等大客戶(hù)已使用多年。機(jī)械手是用來(lái)輸送物料或運(yùn)動(dòng)部件的,它沒(méi)有旋轉(zhuǎn)的刀具主軸
發(fā)布時(shí)間:2022-03-25 點(diǎn)擊次數(shù):68
-
五軸機(jī)械手的主要活動(dòng)考慮到用戶(hù)的安全需求,選用橙黃色進(jìn)行分配。橙色黃色能在很大程度上提醒用戶(hù),確保現(xiàn)場(chǎng)操作人員注意使用安全。機(jī)械手在機(jī)械制造業(yè)中應(yīng)用廣泛,發(fā)展迅速。目前主要用于機(jī)床、橫向鍛壓機(jī)的裝卸,以及點(diǎn)焊、噴漆等。可按規(guī)定的操作程序
發(fā)布時(shí)間:2022-03-18 點(diǎn)擊次數(shù):97
-
什么是機(jī)械手堆棧?堆疊系統(tǒng)由多個(gè)成員設(shè)備組成。主交換機(jī)負(fù)責(zé)堆疊系統(tǒng)的運(yùn)行、管理和維護(hù)。其他成員設(shè)備在主交換機(jī)處理業(yè)務(wù)時(shí)作為備份設(shè)備。一旦主交換機(jī)發(fā)生故障,系統(tǒng)會(huì)自動(dòng)選擇新的主交換機(jī),保證業(yè)務(wù)不中斷。一般的控制系統(tǒng)都有。三軸直角坐標(biāo)機(jī)械手
發(fā)布時(shí)間:2021-12-17 點(diǎn)擊次數(shù):326
-
五軸機(jī)械手如何選擇質(zhì)量好的?行業(yè)中有很多機(jī)械手可以選擇,不同廠家的機(jī)械手不一樣,價(jià)格也是不一樣的。機(jī)械手到底我們?nèi)绾芜x擇才能選擇自己心儀的呢?那下面跟著我們科曼斯機(jī)械手具體看下如何選擇吧? 首先我們采購(gòu)機(jī)械手的時(shí)候要明確選擇我們使用這
發(fā)布時(shí)間:2021-11-06 點(diǎn)擊次數(shù):135
-
機(jī)械手控制的要素包括工作順序、到達(dá)位置、動(dòng)作時(shí)間、運(yùn)動(dòng)速度、加減速度等。機(jī)械手的控制分為點(diǎn)位控制和連續(xù)軌跡控制兩種 在正常出產(chǎn)時(shí)由五軸機(jī)械手來(lái)取出制品,注塑機(jī)周期固定,制品穩(wěn)定性佳,使質(zhì)量有確保。五軸機(jī)械手進(jìn)步工作效率,降低人工成本。
發(fā)布時(shí)間:2021-10-11 點(diǎn)擊次數(shù):209
-
機(jī)械手在適當(dāng)位置的控制系統(tǒng)類(lèi)型也影響著可利用性。例如注塑機(jī)控制器綜合在一起的機(jī)械手控制器享有實(shí)現(xiàn)更多便利的普通顯示屏和實(shí)現(xiàn)較少通訊中斷的普通機(jī)械手控制器。其它特點(diǎn)還包括有簡(jiǎn)化機(jī)械手編程的預(yù)編程模板,以及使成型業(yè)者能直接與在線(xiàn)服務(wù)工程師聯(lián)
發(fā)布時(shí)間:2021-09-11 點(diǎn)擊次數(shù):153
-
隨著網(wǎng)絡(luò)技巧的發(fā)展,機(jī)械手的聯(lián)網(wǎng)了操作問(wèn)題也是以后發(fā)展的方向。工業(yè)機(jī)器人是近幾十年發(fā)展起來(lái)的一種高科技自動(dòng)化生產(chǎn)設(shè)備。 三軸、五軸機(jī)械手應(yīng)安裝于金屬等阻燃物上,因?yàn)闄C(jī)械手是通電設(shè)備,若與可燃物碰觸將產(chǎn)生劇烈化學(xué)反應(yīng),因此特別注意安裝環(huán)
發(fā)布時(shí)間:2021-08-21 點(diǎn)擊次數(shù):157
-
該設(shè)備由五軸機(jī)械手、物料架、顏色識(shí)別站、加工站、沖床、成品存儲(chǔ)臺(tái)六個(gè)加工工位組成。以高速度裝入多個(gè)插件或在緊湊的模具空間中脫模復(fù)雜部件所需的多個(gè)動(dòng)作,能通過(guò)此附加軸變得更容易。對(duì)于次級(jí)操作如使部件邊緣通過(guò)高溫的夾具或者將部件放置在托盤(pán)中
發(fā)布時(shí)間:2021-08-03 點(diǎn)擊次數(shù):125
-
在偌大的格力生產(chǎn)車(chē)間以往人挨著人的、密集的工作場(chǎng)面已然消失不見(jiàn)取而代之的是整齊有序的自動(dòng)化生產(chǎn)流程。 一排排的工業(yè)機(jī)器人運(yùn)動(dòng)靈活自如生產(chǎn)程序井井有條,數(shù)字化控制的生產(chǎn)機(jī)組。讓龐大的車(chē)間內(nèi),工人變得很少了這正是格力目前全力以赴的事情——
發(fā)布時(shí)間:2021-07-17 點(diǎn)擊次數(shù):175
-
在中、小零件的生產(chǎn)領(lǐng)域,多工位壓力機(jī)的存在使得自動(dòng)化設(shè)備可能無(wú)用武之地。無(wú)論是七軸機(jī)器人,還是各種各樣的機(jī)械手或多工位壓力機(jī),企業(yè)在項(xiàng)目初期進(jìn)行設(shè)備選用時(shí),要結(jié)合自身零件的特點(diǎn)、現(xiàn)場(chǎng)安裝條件、投資成本等各種條件進(jìn)行綜合考慮,好的自動(dòng)化設(shè)
發(fā)布時(shí)間:2021-04-15 點(diǎn)擊次數(shù):449
-
五軸機(jī)械手的手臂部分可以在一個(gè)幾何平面內(nèi)自由移動(dòng)。機(jī)械手的前兩個(gè)關(guān)節(jié)可以在水平方向及豎直方向自由旋轉(zhuǎn),第三個(gè)關(guān)節(jié)可在第四個(gè)關(guān)節(jié)上水平移動(dòng)。這種獨(dú)特設(shè)計(jì)使機(jī)械手具有很強(qiáng)的剛性,用來(lái)投送物料或移動(dòng)零件,并能將它放到領(lǐng)一個(gè)指定的地方,因此能夠
發(fā)布時(shí)間:2021-03-22 點(diǎn)擊次數(shù):248
-
為什么“五”這個(gè)數(shù)字比“三”和“六”好呢?當(dāng)涉及到機(jī)械手的運(yùn)動(dòng)軸時(shí),這個(gè)問(wèn)題更容易解釋。這些機(jī)械手比標(biāo)準(zhǔn)的三軸機(jī)械手更能干,與六軸關(guān)節(jié)型機(jī)械手相比,往往更具成本效益。 五軸機(jī)械手機(jī)械結(jié)構(gòu)部分包括機(jī)
發(fā)布時(shí)間:2021-02-21 點(diǎn)擊次數(shù):709
-
在正常出產(chǎn)時(shí)由五軸機(jī)械手來(lái)取出制品,注塑機(jī)周期固定,制品穩(wěn)定性佳,使質(zhì)量有確保。 在機(jī)器操作時(shí),五軸機(jī)械手很好地替代人工進(jìn)行運(yùn)作,與工人手工運(yùn)作相比較,人會(huì)疲勞,而機(jī)械手能夠直工作下去,特別能在夜班時(shí)刻發(fā)揮大功能。 五軸機(jī)械手進(jìn)步工
發(fā)布時(shí)間:2021-01-12 點(diǎn)擊次數(shù):250
-
五軸機(jī)械手的電力驅(qū)動(dòng)是機(jī)械手使用得較多的一種驅(qū)動(dòng)方式。其特點(diǎn)是電源方便,響應(yīng)快,驅(qū)動(dòng)力較大(關(guān)節(jié)型的持重已達(dá)400kg),信號(hào)檢測(cè)、傳動(dòng)、處理方便,并可采用多種靈活的控制方案。驅(qū)動(dòng)電機(jī)一般采用步進(jìn)電機(jī),直流伺服電機(jī)(AC)為主要的驅(qū)動(dòng)方
發(fā)布時(shí)間:2020-12-15 點(diǎn)擊次數(shù):262
-
五軸機(jī)械手為什么“五”這個(gè)數(shù)字比“三”和“六”好呢?當(dāng)涉及到機(jī)械手的運(yùn)動(dòng)軸時(shí),這個(gè)問(wèn)題更容易解釋。這些機(jī)械手比標(biāo)準(zhǔn)的三軸機(jī)械手更能干,與五軸機(jī)械手相比,往往更具成本效益。 成型商對(duì)抓取和下游定位的高精度與靈活性提出了越來(lái)越高的要求。
發(fā)布時(shí)間:2020-12-14 點(diǎn)擊次數(shù):226
-
五軸機(jī)械手的靈活性越大,通用性越廣,其結(jié)構(gòu)也越雜亂。五軸機(jī)械手是近幾十年發(fā)展起來(lái)的一種高科技自動(dòng)化出產(chǎn)設(shè)備它對(duì)安穩(wěn)、進(jìn)步商品質(zhì)量進(jìn)步出產(chǎn)功率改善勞作條件和商品的疾速更新?lián)Q代起著十分主要的作用。五軸機(jī)械手包括多軸向伺服驅(qū)動(dòng)在內(nèi),只需
發(fā)布時(shí)間:2020-11-26 點(diǎn)擊次數(shù):241
-
對(duì)不同模具和機(jī)器的適應(yīng)性。在軟件中重新編程伺服動(dòng)作的能力對(duì)于要轉(zhuǎn)換工裝的訂制成型商尤為重要。 五軸機(jī)械手是指伺服馬達(dá)數(shù)量,3軸就是總共3個(gè)伺服馬達(dá)。以5軸為例:橫行使用1個(gè)伺服馬達(dá),1軸;主臂用2個(gè)馬達(dá):升降1個(gè) 在裝置、配線(xiàn)、運(yùn)
發(fā)布時(shí)間:2020-10-21 點(diǎn)擊次數(shù):210
-
五軸機(jī)械手適用于注塑成型時(shí)成品及水口料的取出,分為單截式與雙截式供客戶(hù)選擇,適用于二板模、三板模或熱流道模具。能實(shí)現(xiàn)各種特殊動(dòng)作,如排列、堆放、品檢和埋入等。適用于鎖模力在850T以下的射出成型機(jī)。三軸、五軸機(jī)械手使用時(shí)有必要接地,機(jī)械
發(fā)布時(shí)間:2020-09-08 點(diǎn)擊次數(shù):199
-
五軸機(jī)械手能模仿人手和臂的某些動(dòng)作功能,用以按固定程序抓取、搬運(yùn)物件或操作工具的自動(dòng)操作裝置。機(jī)械手是早出現(xiàn)的工業(yè)機(jī)器人,也是早出現(xiàn)的現(xiàn)代機(jī)器人,機(jī)械手,它可代替人的繁重勞動(dòng)以實(shí)現(xiàn)生產(chǎn)的機(jī)械化和自動(dòng)化,能在有害環(huán)
發(fā)布時(shí)間:2020-07-21 點(diǎn)擊次數(shù):231
-
1、為五軸機(jī)械手供給動(dòng)力來(lái)源的是動(dòng)力單元以及驅(qū)動(dòng)單元兩部分。 2、執(zhí)行組織單元為五軸機(jī)械手執(zhí)行部分,能依據(jù)操控中心指令來(lái)執(zhí)行指令,完結(jié)操作人員指定任務(wù),而且按期完結(jié)。當(dāng)使用者接到任務(wù)時(shí),只需求在操控面板輸入相應(yīng)
發(fā)布時(shí)間:2020-05-12 點(diǎn)擊次數(shù):835
-
1.伺服主臂+1伺服料臂,雙臂五軸伺服機(jī)械手 這種結(jié)構(gòu)是市面上常用的五軸機(jī)械手結(jié)構(gòu),首要用于冷流道三板模注塑自動(dòng)化系統(tǒng)中。兩個(gè)伺服手臂中主臂擔(dān)任制品的取出,也能夠用在埋鑲件系統(tǒng)中鑲件埋入并制品取出;副臂則擔(dān)任撿水口。 2.雙主臂
發(fā)布時(shí)間:2020-03-03 點(diǎn)擊次數(shù):263
-
五軸機(jī)械手有幾大特征 斜臂式機(jī)械手的特征: 、當(dāng)夾持動(dòng)作失利時(shí),只需將射出機(jī)安全門(mén)翻開(kāi),取出制品再關(guān)上安全門(mén),斜臂式機(jī)械手全部動(dòng)作就可以自動(dòng)康復(fù)正常,無(wú)需其他任何設(shè)定。 、五軸機(jī)械手凹凸方位為可調(diào)式,加大上下行程間隔。 、五軸機(jī)
發(fā)布時(shí)間:2019-12-26 點(diǎn)擊次數(shù):418
-
五軸機(jī)械手能仿照人的手和臂一些動(dòng)作功用,以按固定程序抓取、搬運(yùn)物件或操作東西的主動(dòng)操作設(shè)備,而五軸機(jī)械手的五軸是哪五軸呢?即這橫行使用1個(gè)伺服馬達(dá),1軸;主臂用2個(gè)馬達(dá):升降1個(gè)、引拔1個(gè),2軸;副臂用2個(gè)馬達(dá):升降1個(gè)、引拔1個(gè),2軸
發(fā)布時(shí)間:2019-11-27 點(diǎn)擊次數(shù):1402
-
怎么做好五軸機(jī)械手的保養(yǎng)工作呢?這三方面是重要! 雖然機(jī)械手的使用效果很好,但是因?yàn)槭菣C(jī)械設(shè)備,所以使用的時(shí)候頻率是很高的。一般情況下,工業(yè)設(shè)備使用的頻率過(guò)高,就會(huì)影響使用壽命。所以,為了讓機(jī)械手的使用壽命更加的好,就需要去做好保養(yǎng)工
發(fā)布時(shí)間:2019-10-28 點(diǎn)擊次數(shù):271
-
運(yùn)用五軸機(jī)械手注意事項(xiàng)以下為你講解 最專(zhuān)業(yè)的五軸械手在諸多職業(yè)都得到廣泛運(yùn)用,因而年需求量也在節(jié)節(jié)攀升,在機(jī)械手快速發(fā)展中,一方面是數(shù)量在劇增,另一方面更是機(jī)器生產(chǎn)技術(shù)在提升,在新機(jī)器撤銷(xiāo)舊機(jī)器景象下,仍然不行忽視關(guān)于五軸械手安全運(yùn)用
發(fā)布時(shí)間:2019-10-15 點(diǎn)擊次數(shù):417
-
五軸機(jī)械手具有哪些特點(diǎn)分類(lèi) 在注塑機(jī)械手的分類(lèi)中,咱們常說(shuō)的三軸、五軸伺服機(jī)械手指的是伺服馬達(dá)的數(shù)量。3軸指這臺(tái)機(jī)械手有3個(gè)伺服馬達(dá),5臺(tái)是5個(gè)伺服馬達(dá)。在實(shí)踐注塑自動(dòng)化運(yùn)用場(chǎng)景中,咱們常說(shuō)的五軸伺服機(jī)械手能夠有三種方式: 1.
發(fā)布時(shí)間:2019-09-16 點(diǎn)擊次數(shù):366
-
介紹五軸機(jī)械手的特點(diǎn)1、五軸機(jī)械手由機(jī)器準(zhǔn)確操控,因此能夠徹底按照工廠方案來(lái)操控產(chǎn)品產(chǎn)值,排除去人工不可確定性和失誤操作等因素,對(duì)客戶(hù)有確定交貨期,能夠保持良好商譽(yù)和競(jìng)爭(zhēng)力。2、五軸機(jī)械手配備有安全防護(hù)體系,最大程度上能夠規(guī)避職工意外損傷危
發(fā)布時(shí)間:2019-08-28 點(diǎn)擊次數(shù):334
-
感謝各位同仁一直以來(lái)對(duì)公司工作辛苦付出!“五一”國(guó)際勞動(dòng)節(jié)即將來(lái)臨,根據(jù)國(guó)家法定“五一”勞動(dòng)節(jié)假日,并結(jié)合公司實(shí)際工作安排,現(xiàn)將2019年“五一”放假安排通知如下:一、放假安排放假時(shí)間:5月1日~5月4日,共4天(其中5.1為國(guó)家法定節(jié)假日
發(fā)布時(shí)間:2019-04-30 點(diǎn)擊次數(shù):260
-
使用五軸機(jī)械手注意事項(xiàng) 最專(zhuān)業(yè)的五軸機(jī)械手在許多工作都得到廣泛運(yùn)用,因此年需要量也在節(jié)節(jié)攀升,在機(jī)械手快速發(fā)展中,一方面是數(shù)量在劇增,另一方面更是機(jī)器生產(chǎn)技術(shù)在提高,在新機(jī)器吊銷(xiāo)舊機(jī)器景象下,依然不行忽視關(guān)于五軸機(jī)械手安全運(yùn)用。 1
發(fā)布時(shí)間:2019-04-08 點(diǎn)擊次數(shù):547
-
眾所周知,五軸機(jī)械手借助平衡原理實(shí)現(xiàn)對(duì)物體的推拉操作,幫助工廠搬運(yùn)、拿取許多產(chǎn)品,并且,在熟知五軸機(jī)械手是如何工作之后,操作起來(lái)也并不困難,通過(guò)幾次使用很快便能夠熟練操作。下面廣東科曼斯機(jī)械手廠家的的五軸機(jī)械手具有以下優(yōu)勢(shì):1、作為廣東省內(nèi)
發(fā)布時(shí)間:2019-03-22 點(diǎn)擊次數(shù):196
-
五軸機(jī)械手是最早出現(xiàn)的工業(yè)機(jī)器人,也是最早出現(xiàn)的現(xiàn)代機(jī)器人,近年來(lái),在注塑機(jī)作業(yè)得到了廣泛運(yùn)用,跟著注塑機(jī)技能和科技的疾速打開(kāi),工廠對(duì)自身自動(dòng)化程度的需求也變得越來(lái)越高。作業(yè)專(zhuān)家估計(jì)注塑機(jī)器人很快得到廣泛。而五軸機(jī)械手臂將為注塑機(jī)作業(yè)完
發(fā)布時(shí)間:2019-02-15 點(diǎn)擊次數(shù):408
-
中小企業(yè)技改熱情不高有很多原因,一方面是很多中小企業(yè)有在進(jìn)行技改,但是沒(méi)有告知經(jīng)信部門(mén),因而可能沒(méi)有統(tǒng)計(jì)完整,畢竟在當(dāng)前的經(jīng)濟(jì)狀態(tài)下,企業(yè)不進(jìn)行技術(shù)改造進(jìn)行轉(zhuǎn)型升級(jí),其很難生存;另一方面部分中小企業(yè)面臨資金難題,融資難制約了技改,對(duì)整個(gè)市場(chǎng)
發(fā)布時(shí)間:2018-08-17 點(diǎn)擊次數(shù):328
-
自動(dòng)沖壓生產(chǎn)線(xiàn)大多由一臺(tái)雙動(dòng)拉伸壓力機(jī)或多連桿單動(dòng)拉伸壓力機(jī)和4~5臺(tái)單動(dòng)壓力機(jī)組成流水線(xiàn),生產(chǎn)大型車(chē)身覆蓋件,安全性高,沖壓質(zhì)量好。生產(chǎn)線(xiàn)上布置自動(dòng)化上下料系統(tǒng)。東莞沖壓機(jī)器人生產(chǎn)廠家淺析五軸沖壓機(jī)器人的特點(diǎn)及
發(fā)布時(shí)間:2018-08-09 點(diǎn)擊次數(shù):195
-
1、機(jī)器人效率高。獨(dú)家(雙倍速)zhuanli設(shè)計(jì)大大提高了生產(chǎn)效率,大負(fù)載、快速、高長(zhǎng)行程作業(yè),為企業(yè)解決了生產(chǎn)效率低的難的難題。2、人性化安全系統(tǒng)。機(jī)器活動(dòng)的主要部件均采用了顏色進(jìn)行搭配,以保證現(xiàn)場(chǎng)操作人員的安全使用。3、伺服系統(tǒng)與強(qiáng)電完全分開(kāi),
發(fā)布時(shí)間:2018-07-04 點(diǎn)擊次數(shù):213
-
五軸機(jī)械手的控制器智能化體現(xiàn) 五軸機(jī)械手控制器擁有多種插補(bǔ)功能,在使用的過(guò)程中可以根據(jù)運(yùn)動(dòng)的需要進(jìn)行插補(bǔ)命令,這個(gè)命令是由控制器內(nèi)部自行合成并且執(zhí)行的,可以保證它在驅(qū)動(dòng)器被可以呈現(xiàn)三種方式的插補(bǔ)控制(直線(xiàn)、圓弧與螺旋),同時(shí),五軸機(jī)械
發(fā)布時(shí)間:2017-11-21 點(diǎn)擊次數(shù):286
-
五軸機(jī)械手具有哪些特點(diǎn) 五軸機(jī)械手一般應(yīng)用于對(duì)物體的抓取和搬運(yùn),它是搬運(yùn)大型物體的機(jī)械能手,無(wú)論是將物體旋轉(zhuǎn)還是上下升降等,它都是不可缺少的一個(gè)助手。在使用該機(jī)器之前,對(duì)其特點(diǎn)有過(guò)全面了解后才能夠駕輕就熟,以下列出五軸機(jī)械手五大特點(diǎn)。
發(fā)布時(shí)間:2017-07-21 點(diǎn)擊次數(shù):401
-
五軸機(jī)械手的發(fā)展遠(yuǎn)景 五軸機(jī)械手能仿照人的手和臂一些動(dòng)作功用,以按固定程序抓取、轉(zhuǎn)移物件或操作東西的自動(dòng)操作設(shè)備。機(jī)械手是最早出現(xiàn)的工業(yè)機(jī)械也是最早出現(xiàn)的現(xiàn)代機(jī)器人,雖然有點(diǎn)粗笨,卻能夠代替人的深重勞動(dòng)以結(jié)束出產(chǎn)的機(jī)械化和自動(dòng)化,能在
發(fā)布時(shí)間:2017-06-27 點(diǎn)擊次數(shù):223
-
科曼斯自動(dòng)化機(jī)械科技有限公司,其主要生產(chǎn)注塑機(jī)機(jī)械手以及工業(yè)非標(biāo)自動(dòng)化設(shè)備。是一家機(jī)械自動(dòng)化設(shè)備研發(fā)、制造、銷(xiāo)售、服務(wù)為一體的高新科技企業(yè)。公司產(chǎn)品廣泛應(yīng)用于基礎(chǔ)工業(yè)、汽車(chē)及零配件、工業(yè)電器、電子通訊、食品飲料、醫(yī)
發(fā)布時(shí)間:2017-03-26 點(diǎn)擊次數(shù):415
-
五軸機(jī)械手操控器超越了單機(jī)的考慮方法,將三臺(tái)伺服融合在同一機(jī)座內(nèi),五軸機(jī)械手操控器同動(dòng)無(wú)間操控,具有強(qiáng)壯的靈敏操控性,精準(zhǔn)操控。五軸機(jī)械手操控器或兩軸伺服機(jī)械手操控器多種插補(bǔ)功用,依據(jù)運(yùn)動(dòng)需要插補(bǔ)指令由操控內(nèi)自行合成并同步履行,可以直接在驅(qū)
發(fā)布時(shí)間:2017-01-09 點(diǎn)擊次數(shù):256
-
五軸機(jī)械手有幾大特征?斜臂式機(jī)械手的特征:1、當(dāng)夾持動(dòng)作失利時(shí),只需將射出機(jī)安全門(mén)翻開(kāi),取出成品再關(guān)上安全門(mén),斜臂式機(jī)械手悉數(shù)動(dòng)作就可以主動(dòng)恢復(fù)正常,無(wú)需別的任何設(shè)定。2、五軸機(jī)械手凹凸方位為可調(diào)式,加大上下行程距離。3、五軸機(jī)械手上下導(dǎo)桿
發(fā)布時(shí)間:2016-12-28 點(diǎn)擊次數(shù):258
-
五軸機(jī)械手有一種亂刀現(xiàn)象,其因素是運(yùn)用環(huán)境和運(yùn)用年限的因素形成某些檢查信號(hào)反常,導(dǎo)致亂刀,碰到此類(lèi)疑問(wèn),首先要依照邏輯判斷毛病元器件,將其修正或替換后,先要將刀庫(kù)中的一切刀具取出(從刀庫(kù)頂用東西取出或逐個(gè)換到主軸上手動(dòng)取出),然后從主軸側(cè)逐
發(fā)布時(shí)間:2016-12-17 點(diǎn)擊次數(shù):332
-
五軸機(jī)械手在汽車(chē)行業(yè)有哪些應(yīng)用?20世紀(jì)90年代以來(lái),大規(guī)模集成電路及計(jì)算機(jī)技能的迅猛開(kāi)展使氣動(dòng)機(jī)械手的制作技能日臻成熟,機(jī)械手功能的改進(jìn)和工作可靠性的進(jìn)步以及其外形體積和報(bào)價(jià)的不斷下降,使其在轎車(chē)制工作中得到廣泛使用。跟著機(jī)械手報(bào)價(jià)優(yōu)勢(shì)越
發(fā)布時(shí)間:2016-12-07 點(diǎn)擊次數(shù):331
-
五軸機(jī)械手的機(jī)體構(gòu)造:五軸機(jī)械手軸選用變頻馬達(dá)驅(qū)動(dòng),上下及引拔軸運(yùn)用氣缸驅(qū)動(dòng)。變頻橫走機(jī)械手、上下手臂均運(yùn)用進(jìn)口的高剛性線(xiàn)性滑軌。引拔及上下運(yùn)用質(zhì)量輕高剛性的鋁合金擠型梁合作線(xiàn)性軸承及高剛性軸承鋼,能到達(dá)取出速度快、高效能、轟動(dòng)小、運(yùn)用壽命
發(fā)布時(shí)間:2016-11-26 點(diǎn)擊次數(shù):447
-
從各國(guó)的職業(yè)統(tǒng)計(jì)資料來(lái)看,近30多年來(lái),五軸機(jī)械手職業(yè)開(kāi)展很快。20世紀(jì)70年代,液壓與氣動(dòng)元件的產(chǎn)量比約為9:1,而30多年后的今日,在工業(yè)技能發(fā)達(dá)的歐美、日本國(guó)家,該份額已到達(dá)6:4,乃至挨近5:5。我國(guó)的氣動(dòng)職業(yè)起步較晚,但開(kāi)展較快。
發(fā)布時(shí)間:2016-11-16 點(diǎn)擊次數(shù):344
-
五軸機(jī)械手在注塑工藝方面有什么作用?立式機(jī)械手在注塑技術(shù)中的使用。在傳統(tǒng)的注塑成型技術(shù),由最早人工合模成型,到注塑機(jī)油壓合模成型,在演變成今日電腦控制成型技術(shù),前進(jìn)不僅反響在商品技術(shù)質(zhì)量、外觀,還有成型功率等。伺服機(jī)械手立式機(jī)械手在使用過(guò)程
發(fā)布時(shí)間:2016-11-04 點(diǎn)擊次數(shù):317
-
五軸機(jī)械手的功能是將工件從A處移送到B處。其操控請(qǐng)求如下:1、氣動(dòng)機(jī)械手的升降和擺布移行分別由不同的雙線(xiàn)圈電磁閥來(lái)完成,電磁閥線(xiàn)圈失電時(shí)能堅(jiān)持本來(lái)的狀況,有必要驅(qū)動(dòng)反向的線(xiàn)圈才干反向運(yùn)動(dòng);2、上升、降低的電磁閥線(xiàn)圈分別為YV2、YV1;右行
發(fā)布時(shí)間:2016-10-13 點(diǎn)擊次數(shù):249
-
五軸機(jī)械手為主動(dòng)發(fā)明奇觀今注塑工業(yè)現(xiàn)已進(jìn)入洗牌年代、微利年代和轉(zhuǎn)型年代,面臨“招工難、人工高、活動(dòng)大”的用工環(huán)境,面臨通貨膨脹、經(jīng)濟(jì)不景氣的商場(chǎng),面臨注塑本錢(qián)不斷攀升,客戶(hù)請(qǐng)求越來(lái)越高,競(jìng)爭(zhēng)日趨激烈的年代,注塑公司只要改動(dòng)傳統(tǒng)思路,向內(nèi)部挖
發(fā)布時(shí)間:2016-09-19 點(diǎn)擊次數(shù):223
-
東莞五軸機(jī)械手是在機(jī)械化,自動(dòng)化出產(chǎn)過(guò)程中開(kāi)展起來(lái)的一種新型設(shè)備。在現(xiàn)代出產(chǎn)過(guò)程中,機(jī)械手被廣泛的運(yùn)用于自動(dòng)出產(chǎn)線(xiàn)中,機(jī)械人的研發(fā)和出產(chǎn)已成為高技能鄰域內(nèi),敏捷開(kāi)展起來(lái)的一門(mén)新式的技能,它更加促進(jìn)了機(jī)械手的開(kāi)展,使得機(jī)械手能非常好地完成與機(jī)
發(fā)布時(shí)間:2016-09-01 點(diǎn)擊次數(shù):250
-
伺服機(jī)械手是在機(jī)械化,自動(dòng)化出產(chǎn)過(guò)程中開(kāi)展起來(lái)的一種新式設(shè)備。在現(xiàn)代出產(chǎn)過(guò)程中,機(jī)械手被廣泛的運(yùn)用于自動(dòng)出產(chǎn)線(xiàn)中,機(jī)械人的研發(fā)和出產(chǎn)已成為高技能領(lǐng)域內(nèi),敏捷開(kāi)展起來(lái)的一門(mén)新式的技能,它愈加促進(jìn)了機(jī)械手的開(kāi)展,使得機(jī)械手能更好地完成與機(jī)械化和
發(fā)布時(shí)間:2016-08-20 點(diǎn)擊次數(shù):248
-
五軸機(jī)械手能仿照人的手和臂一些動(dòng)作功用,以按固定程序抓取、搬運(yùn)物件或操作東西的主動(dòng)操作設(shè)備。機(jī)械手是最早呈現(xiàn)的工業(yè)機(jī)械也是最早呈現(xiàn)的現(xiàn)代機(jī)器人,盡管有點(diǎn)粗笨,卻可以代替人的繁重勞作以完結(jié)出產(chǎn)的機(jī)械化和主動(dòng)化,能在有害環(huán)境下操作以
發(fā)布時(shí)間:2016-07-30 點(diǎn)擊次數(shù):262
-
1使用要求分析 對(duì)于選型的人員首先要有物理運(yùn)動(dòng)學(xué)基礎(chǔ),材料力學(xué)基礎(chǔ),伺服驅(qū)動(dòng)器使用和數(shù)控系統(tǒng)的應(yīng)用經(jīng)驗(yàn),伺服機(jī)械手,三軸機(jī)械手,五軸機(jī)械手,機(jī)械手但最主要是把用戶(hù)的問(wèn)題和要求等了解清楚。對(duì)于簡(jiǎn)單任務(wù)和有經(jīng)驗(yàn)的工程師通過(guò)電話(huà)和郵件就可
發(fā)布時(shí)間:2016-07-11 點(diǎn)擊次數(shù):422
-
科曼斯自動(dòng)化機(jī)械科技有限公司首要出產(chǎn)注塑機(jī)機(jī)械手以及工業(yè)非標(biāo)自動(dòng)化設(shè)備。是一家機(jī)械自動(dòng)化設(shè)備研制、制作、出售、服務(wù)為一體的高新科技企業(yè)。公司商品廣泛使用于基礎(chǔ)工業(yè)、轎車(chē)及零配件、工業(yè)電器、電子通訊、食品飲料、醫(yī)療、玩具、化妝
發(fā)布時(shí)間:2016-06-27 點(diǎn)擊次數(shù):214
-
中小企業(yè)技改熱情不高有很多原因,一方面是很多中小企業(yè)有在進(jìn)行技改,但是沒(méi)有告知經(jīng)信部門(mén),因而可能沒(méi)有統(tǒng)計(jì)完整,畢竟在當(dāng)前的經(jīng)濟(jì)狀態(tài)下,企業(yè)不進(jìn)行技術(shù)改造進(jìn)行轉(zhuǎn)型升級(jí),其很難生存;另一方面部分中小企業(yè)面臨資金難題,融資難制約了技改,對(duì)整個(gè)
發(fā)布時(shí)間:2016-05-21 點(diǎn)擊次數(shù):321
-
科曼斯通用機(jī)械設(shè)備告訴你,遇到五軸機(jī)械手出現(xiàn)毛病改如何解決,如何延長(zhǎng)他的使用壽命。其呈現(xiàn)毛病如何檢查呢?查看自動(dòng)化五軸機(jī)械手設(shè)備的傳感器方位是不是呈現(xiàn)偏移。因?yàn)樵O(shè)備保護(hù)人員的疏忽,也許某些傳感器的方位呈現(xiàn)差錯(cuò),呈現(xiàn)誤差及時(shí)調(diào)理,傳感器假
發(fā)布時(shí)間:2016-04-26 點(diǎn)擊次數(shù):263
-
五軸機(jī)械手是能模仿人手和臂的某些動(dòng)作功能,固定程序抓取、搬運(yùn)物件或操作工具的自動(dòng)操作裝置。它可代替人繁重的體力勞動(dòng)以實(shí)現(xiàn)生產(chǎn)的機(jī)械化和自動(dòng)化,能在有害環(huán)境下操作以保護(hù)人身安全,因而廣泛應(yīng)用于機(jī)械制造、冶金、電子、輕工和原子能等部門(mén)。五軸
發(fā)布時(shí)間:2016-04-19 點(diǎn)擊次數(shù):232
-
五軸機(jī)械手對(duì)機(jī)械手的可靠性和售后服務(wù)質(zhì)量的評(píng)價(jià)。和其他機(jī)械設(shè)備一樣,機(jī)械手上適用的零部件也會(huì)呈現(xiàn)毛病,所以要仔細(xì)觀察保修期限,評(píng)價(jià)保修期時(shí),不單單要查詢(xún)主關(guān)零部件的期限,特別要查詢(xún)那些不在質(zhì)保范圍內(nèi)的易損零件的晶牌,一臺(tái)三年質(zhì)保期的機(jī)械
發(fā)布時(shí)間:2016-03-26 點(diǎn)擊次數(shù):270
-
五軸機(jī)械手標(biāo)準(zhǔn)選用進(jìn)口變頻馬達(dá)驅(qū)動(dòng),工作平穩(wěn)而經(jīng)濟(jì)。可選購(gòu)AC伺服馬達(dá)驅(qū)動(dòng),工作速度快而精準(zhǔn),定位精度達(dá)±0.1MM; ●橫行、上下、引拔臂選用高剛性精細(xì)直線(xiàn)線(xiàn)性滑軌,耐磨耗,低噪音。平穩(wěn)壽命長(zhǎng); ●雙截式上下手臂選用質(zhì)量輕、高剛
發(fā)布時(shí)間:2016-03-19 點(diǎn)擊次數(shù):345
-
目前國(guó)內(nèi)氣動(dòng)五軸機(jī)械手發(fā)展趨勢(shì)主要有以下幾點(diǎn): 1、五軸機(jī)械手的重復(fù)精度將越來(lái)越高。 2、模塊化。模塊化組裝的五軸機(jī)械手能使同一五軸機(jī)械手動(dòng)作自若并能夠完結(jié)運(yùn)用不一樣的模塊而具有不一樣的功用。 3、節(jié)能化。 4、機(jī)電一體化。由“
發(fā)布時(shí)間:2016-03-02 點(diǎn)擊次數(shù):256
-
在如今這個(gè)追求機(jī)械化和自動(dòng)化的年代,五軸機(jī)械手的使用是一個(gè)必定的趨勢(shì)。如今越來(lái)越多的公司也都開(kāi)始有了機(jī)械手的使用,實(shí)踐也證實(shí)機(jī)械手的使用讓許多職業(yè)在出產(chǎn)功率和商品的質(zhì)量上都有了必定的提高。 五軸機(jī)械手作為機(jī)械手商品中備受重視的一種,在
發(fā)布時(shí)間:2016-01-09 點(diǎn)擊次數(shù):244
-
五軸機(jī)械手的伺服操控級(jí)地由一組伺服操控系統(tǒng)構(gòu)成,每一個(gè)伺服操控系統(tǒng)別離驅(qū)動(dòng)操作機(jī)的一個(gè)關(guān)節(jié)。關(guān)節(jié)運(yùn)動(dòng)參數(shù)來(lái)自主操控級(jí)的輸出。首要構(gòu)成部分有以下幾個(gè)。 1、電伺服驅(qū)動(dòng)器一般由伺服電動(dòng)機(jī)、方位傳感器、速度傳感器和制動(dòng)器構(gòu)成。伺服電動(dòng)機(jī)的輸
發(fā)布時(shí)間:2016-01-09 點(diǎn)擊次數(shù):306
-
五軸機(jī)械手是最早出現(xiàn)的工業(yè)機(jī)器人,也是最早出現(xiàn)的現(xiàn)代機(jī)器人,近年來(lái),在注塑機(jī)工作得到了廣泛運(yùn)用,跟著注塑機(jī)技術(shù)和科技的疾速展開(kāi),工廠對(duì)本身自動(dòng)化程度的需要也變得越來(lái)越高。工作專(zhuān)家估量注塑機(jī)器人很快得到廣泛。而五軸機(jī)械手臂將為注塑機(jī)工作完
發(fā)布時(shí)間:2015-11-05 點(diǎn)擊次數(shù):218
-
五軸機(jī)械手在現(xiàn)代化工業(yè)生產(chǎn)及運(yùn)送中起到了非常大的效果,它的高效長(zhǎng)時(shí)作業(yè)節(jié)省了很大的勞動(dòng)力資本。可是再高端的機(jī)器,毛病仍是有的。當(dāng)五軸機(jī)械手刀庫(kù)換刀出現(xiàn)毛病了咱們?cè)撛趺崔k?下面小編來(lái)給大家細(xì)心的剖析一下。 1、假設(shè)五軸機(jī)械手在換刀過(guò)程中
發(fā)布時(shí)間:2015-11-05 點(diǎn)擊次數(shù):252
-
跟著科學(xué)技術(shù)的開(kāi)展,五軸機(jī)械手也不斷增加的地被運(yùn)用。在機(jī)械工業(yè)中,運(yùn)用注塑機(jī)五軸機(jī)械手的意義有哪呢? 1、以改善勞作條件,避免人身事故 在高溫、高壓、低溫、低壓、有塵埃、噪聲、臭味、有放射性或有別的毒性污染以及工作空間狹窄的場(chǎng)合中,
發(fā)布時(shí)間:2015-11-05 點(diǎn)擊次數(shù):329
-
五軸機(jī)械手是在自動(dòng)化設(shè)備的基礎(chǔ)上,依據(jù)沖壓生產(chǎn)特點(diǎn),專(zhuān)門(mén)為完成沖壓自動(dòng)化無(wú)人生產(chǎn)而研制的設(shè)備。五軸機(jī)械手為適應(yīng)柔性化的生產(chǎn)請(qǐng)求,壓力機(jī)的一切操控功用應(yīng)做到集成化,然后完成全套模具的菜單化辦理,首要包含滑塊行程調(diào)整、平衡器氣壓的調(diào)整、氣墊
發(fā)布時(shí)間:2015-11-05 點(diǎn)擊次數(shù):332
-
跟著塑料加工職業(yè)在中國(guó)的迅速開(kāi)展,注塑成型設(shè)備的自動(dòng)化程度也越來(lái)越高。現(xiàn)代化的注塑機(jī)常常裝備有機(jī)械手,以進(jìn)步出產(chǎn)功率。五軸機(jī)械手是可以模仿人體上肢的有些功用,可以對(duì)其進(jìn)行自動(dòng)控制使其依照預(yù)訂請(qǐng)求運(yùn)送成品或料理工具進(jìn)行出產(chǎn)操作的自動(dòng)化出產(chǎn)
發(fā)布時(shí)間:2015-11-05 點(diǎn)擊次數(shù):257
-
五軸機(jī)械手所用的驅(qū)動(dòng)組織主要有4種:液壓驅(qū)動(dòng)、氣壓驅(qū)動(dòng)、電氣驅(qū)動(dòng)和機(jī)械驅(qū)動(dòng)。其間以液壓驅(qū)動(dòng)、氣壓驅(qū)動(dòng)用得最多。下面是小編一一為我們介紹這4種驅(qū)動(dòng)式 1、液壓驅(qū)動(dòng)式 液壓驅(qū)動(dòng)式五軸機(jī)械手一般由液動(dòng)機(jī)(各種油缸、油馬達(dá))、伺服閥、油泵、
發(fā)布時(shí)間:2015-11-05 點(diǎn)擊次數(shù):319
-
自動(dòng)化設(shè)備五軸機(jī)械手是近幾十年發(fā)展起來(lái)的一種高科技自動(dòng)化出產(chǎn)設(shè)備,它的特色是可通過(guò)編程來(lái)完結(jié)各種預(yù)期的工作使命,在結(jié)構(gòu)和性能上兼有人和機(jī)器各自的長(zhǎng)處,特別表現(xiàn)了人的智能和適應(yīng)性。 五軸機(jī)械手主要由手部和運(yùn)動(dòng)組織構(gòu)成。手部是用來(lái)抓持工件
發(fā)布時(shí)間:2015-11-05 點(diǎn)擊次數(shù):208
-
跟著塑料加工行業(yè)在中國(guó)的迅速開(kāi)展,注塑成型設(shè)備的自動(dòng)化程度也越來(lái)越高。現(xiàn)代化的注塑機(jī)常常裝備有五軸機(jī)械手,以進(jìn)步出產(chǎn)功率。注塑五軸機(jī)械手是可以模仿人體上肢的部分功用,可以對(duì)其進(jìn)行自動(dòng)控制使其依照預(yù)訂請(qǐng)求運(yùn)送成品或料理東西進(jìn)行出產(chǎn)操作的自
發(fā)布時(shí)間:2017-08-31 點(diǎn)擊次數(shù):337

械手")











 724小時(shí)服務(wù)支持
724小時(shí)服務(wù)支持
 型號(hào)齊全可非標(biāo)定制
型號(hào)齊全可非標(biāo)定制
 機(jī)械手源頭生產(chǎn)廠家
機(jī)械手源頭生產(chǎn)廠家
 做工精密 壽命長(zhǎng)
做工精密 壽命長(zhǎng)




