科曼斯-注塑行業(yè)自動化整體解決方案專業(yè)提供商
專注注塑設(shè)備10余年,成功服務(wù)1000+家企業(yè)
科曼斯服務(wù)熱線
0769-88877337
138 2926 9725
科曼斯-注塑行業(yè)自動化整體解決方案專業(yè)提供商
專注注塑設(shè)備10余年,成功服務(wù)1000+家企業(yè)
科曼斯服務(wù)熱線
0769-88877337
138 2926 9725
械手")
廣東科曼斯智能科技有限公司
聯(lián)系人:呂先生 13829269725
邱小姐 13418234031
Tel: 0769-88877337
E-mail:dglqm@kemansi.com
地址: 東莞市高埗鎮(zhèn)冼沙五坊祥福路3號
網(wǎng)址:qjogr.cn
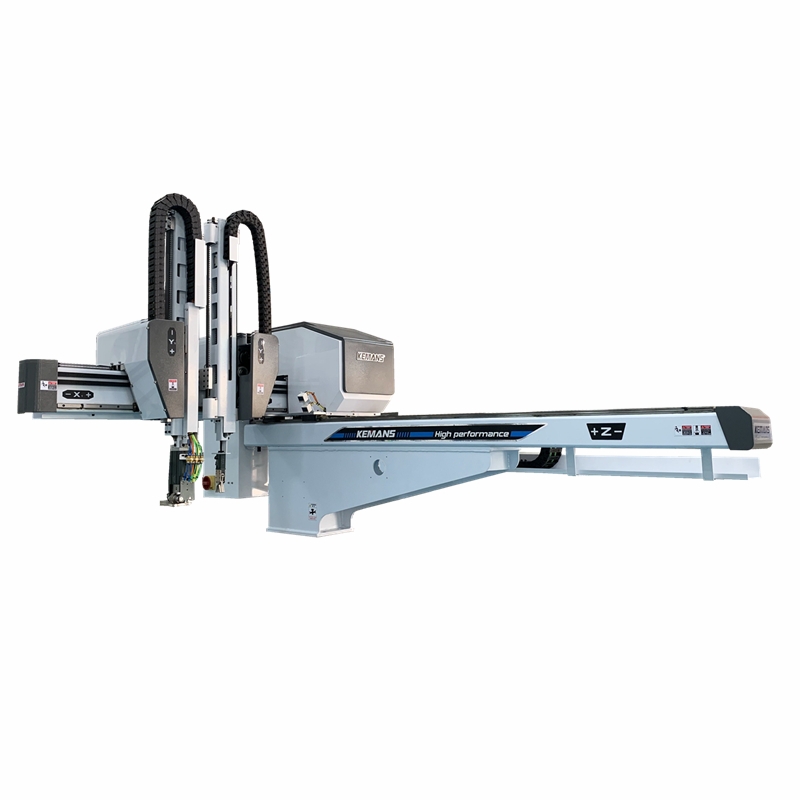
五軸機(jī)械手怎么控制呢
五軸機(jī)械手的控制通常分為以下幾個步驟:
建立機(jī)械手模型:首先需要建立機(jī)械手的運(yùn)動學(xué)模型,包括各個關(guān)節(jié)的旋轉(zhuǎn)軸線、關(guān)節(jié)長度、關(guān)節(jié)角度范圍等參數(shù)。
設(shè)計(jì)運(yùn)動控制器:根據(jù)機(jī)械手的運(yùn)動學(xué)模型,設(shè)計(jì)控制器來控制機(jī)械手的運(yùn)動。常見的控制器包括PID控制器、模糊控制器、神經(jīng)網(wǎng)絡(luò)控制器等。
運(yùn)動規(guī)劃:制定機(jī)械手的運(yùn)動規(guī)劃,包括起始位置、目標(biāo)位置、移動速度等參數(shù)。常用的規(guī)劃方法包括直線插補(bǔ)、圓弧插補(bǔ)等。
械手")
實(shí)時控制:將運(yùn)動控制器和運(yùn)動規(guī)劃器結(jié)合起來,實(shí)現(xiàn)機(jī)械手的實(shí)時控制。控制器根據(jù)當(dāng)前機(jī)械手的位置和目標(biāo)位置之間的誤差,計(jì)算出控制信號,然后通過電機(jī)驅(qū)動器將信號轉(zhuǎn)換為電機(jī)控制信號。
反饋控制:通過傳感器等反饋裝置對機(jī)械手的位置、速度、加速度等狀態(tài)進(jìn)行監(jiān)測和反饋控制,實(shí)現(xiàn)機(jī)械手的閉環(huán)控制。
以上是控制五軸機(jī)械手的基本步驟,具體的實(shí)現(xiàn)方式會因機(jī)械手的類型、控制要求等因素而有所不同。
五軸機(jī)械手通常可以在一些機(jī)械設(shè)備生產(chǎn)廠家或機(jī)械手生產(chǎn)廠家處購買。您可以在當(dāng)?shù)氐臋C(jī)械設(shè)備市場或者互聯(lián)網(wǎng)上搜索機(jī)械手相關(guān)的信息,找到一些可靠的廠家或供應(yīng)商,了解機(jī)械手的型號、價格、技術(shù)參數(shù)等信息。在購買前,建議您多做一些調(diào)查和比較,以確保您得到的機(jī)械手是符合您需求的,同時也要注意廠家的信譽(yù)和售后服務(wù)。
 724小時服務(wù)支持
724小時服務(wù)支持
 型號齊全可非標(biāo)定制
型號齊全可非標(biāo)定制
 機(jī)械手源頭生產(chǎn)廠家
機(jī)械手源頭生產(chǎn)廠家
 做工精密 壽命長
做工精密 壽命長