科曼斯-注塑行業自動化整體解決方案專業提供商
專注注塑設備10余年,成功服務1000+家企業
科曼斯服務熱線
0769-88877337
138 2926 9725
科曼斯-注塑行業自動化整體解決方案專業提供商
專注注塑設備10余年,成功服務1000+家企業
科曼斯服務熱線
0769-88877337
138 2926 9725

廣東科曼斯智能科技有限公司
聯系人:呂先生 13829269725
邱小姐 13418234031
Tel: 0769-88877337
E-mail:dglqm@kemansi.com
地址: 東莞市高埗鎮冼沙五坊祥福路3號
網址:qjogr.cn
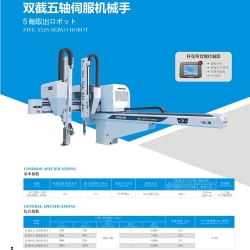
五軸機械手的伺服操控級地由一組伺服操控系統構成,每一個伺服操控系統別離驅動操作機的一個關節。關節運動參數來自主操控級的輸出。首要構成部分有以下幾個。
1、電伺服驅動器一般由伺服電動機、方位傳感器、速度傳感器和制動器構成。伺服電動機的輸出軸直接與操作機關節軸相聯接,以完結關節運動的操控和關節方位、速度的檢查。失電時制動器能主動制動,堅持關節原位靜止不動。制動器由電磁鐵、沖突盤等構成。作業時,電磁鐵線圈通電、沖突盤脫開,關節軸能夠自在滾動;失電時,沖突盤在繃簧力的效果下壓緊而制動。為使整體結構簡化,一般將制動器與伺服機構做成一體。
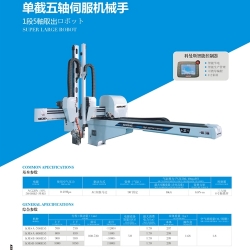
2、伺服操控器
伺服操控器是根本部件是對比器、差錯擴大器和運算器。輸入信號除參閱信號外,還有各種反應信號。操控器能夠選用模仿器材構成,首要用集成運算擴大器和阻容網絡完結信號的對比、運算和擴大等功能,構成模仿伺服系統。操控器也能夠選用數字器材構成,如選用微處理器構成數字伺服系統。其對比、運算和擴大等功能由軟件完結。這種伺服系統靈活性強,便于完結各種復雜的操控,能取得較高的性能指標。
 724小時服務支持
724小時服務支持
 型號齊全可非標定制
型號齊全可非標定制
 機械手源頭生產廠家
機械手源頭生產廠家
 做工精密 壽命長
做工精密 壽命長