科曼斯-注塑行業(yè)自動(dòng)化整體解決方案專業(yè)提供商
專注注塑設(shè)備10余年,成功服務(wù)1000+家企業(yè)
科曼斯服務(wù)熱線
0769-88877337
138 2926 9725
科曼斯-注塑行業(yè)自動(dòng)化整體解決方案專業(yè)提供商
專注注塑設(shè)備10余年,成功服務(wù)1000+家企業(yè)
科曼斯服務(wù)熱線
0769-88877337
138 2926 9725
械手")
廣東科曼斯智能科技有限公司
聯(lián)系人:呂先生 13829269725
邱小姐 13418234031
Tel: 0769-88877337
E-mail:dglqm@kemansi.com
地址: 東莞市高埗鎮(zhèn)冼沙五坊祥福路3號(hào)
網(wǎng)址:qjogr.cn
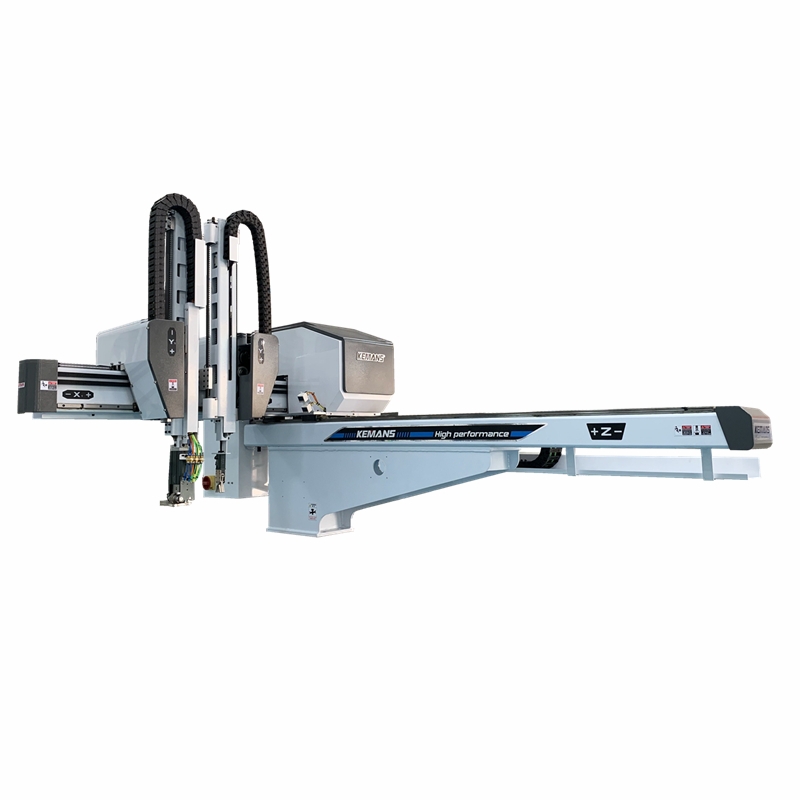
隨著工業(yè)自動(dòng)化性質(zhì)的日益強(qiáng)烈,許多傳統(tǒng)的手動(dòng)機(jī)械已逐漸被注射機(jī)械手和工業(yè)機(jī)器人所取代,并逐漸被自動(dòng)化操作所取代。注塑機(jī)機(jī)械手是自動(dòng)化社會(huì)的產(chǎn)物。許多企業(yè)已逐漸開始在加工過程中使用這種自動(dòng)化設(shè)備。以下是由科曼斯小編給大家?guī)?/span>全伺服機(jī)械手知識(shí)介紹
1、機(jī)械手的手部結(jié)構(gòu)方案設(shè)計(jì):
為了使機(jī)械手的通用性更強(qiáng),把機(jī)械手的手部結(jié)構(gòu)設(shè)計(jì)成可更換結(jié)構(gòu),當(dāng)工件是棒料時(shí),使用夾持式手部;當(dāng)工件是板料時(shí),使用氣流負(fù)壓式吸盤。
2、單軸伺服機(jī)械手的手腕結(jié)構(gòu)方案設(shè)計(jì):
考慮到機(jī)械手的通用性,同時(shí)由于被抓取工件是水平放置,因此手腕須設(shè)有回轉(zhuǎn)運(yùn)動(dòng)才可滿足工作的要求。因此,手腕設(shè)計(jì)成回轉(zhuǎn)結(jié)構(gòu),實(shí)現(xiàn)手腕回轉(zhuǎn)運(yùn)動(dòng)的機(jī)構(gòu)為回轉(zhuǎn)液壓缸。
3、機(jī)械手的座標(biāo)型式與自由度:
按機(jī)械手手臂的不同運(yùn)動(dòng)形式及其組合情況,其座標(biāo)型式可分為直角座標(biāo)式、圓柱座標(biāo)式、球座標(biāo)式和關(guān)節(jié)式。由于本機(jī)械手在上下料時(shí)手臂具有升降、收縮及回轉(zhuǎn)運(yùn)動(dòng),因此,采用圓柱座標(biāo)型式。相應(yīng)的機(jī)械手具有三個(gè)自由度,為了彌補(bǔ)升降運(yùn)動(dòng)行程較小的缺點(diǎn),增加手臂擺動(dòng)機(jī)構(gòu),從而增加一個(gè)手臂上下擺動(dòng)的自由度。
械手")
 724小時(shí)服務(wù)支持
724小時(shí)服務(wù)支持
 型號(hào)齊全可非標(biāo)定制
型號(hào)齊全可非標(biāo)定制
 機(jī)械手源頭生產(chǎn)廠家
機(jī)械手源頭生產(chǎn)廠家
 做工精密 壽命長
做工精密 壽命長